MEMS陀螺仪测角速度的,MEMS加速度是测线性加速度的。前者是惯性原理,后者是利用的力平衡原理。加速度计在较长时间的测量值是正确的,而在较短时间内由于信号噪声的存在,而有误差。陀螺仪在较短时间内则比较准确而较长时间则会有与漂移而存有误差。因此,需要两者(相互调整)来确保航向的正确。现在一般的姿态方面的惯性应用,如IMU(惯性测量单元),由三轴陀螺仪和三轴加速度计组合而成。
详解:MEMS加速度计原理
技术成熟的MEMS加速度计分为三种:压电式、容感式、热感式。压电式MEMS加速度计运用的是压电效应,在其内部有一个刚体支撑的质量块,有运动的情况下质量块会产生压力,刚体产生应变,把加速度转变成电信号输出。
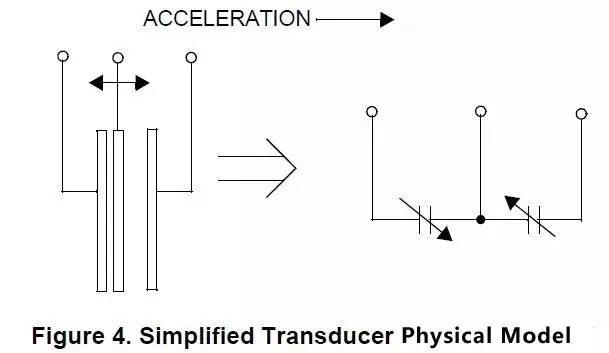
容感式MEMS加速度计内部也存在一个质量块,从单个单元来看,它是标准的平板电容器。加速度的变化带动活动质量块的移动从而改变平板电容两极的间距和正对面积,通过测量电容变化量来计算加速度。
热感式MEMS加速度计内部没有任何质量块,它的中央有一个加热体,周边是温度传感器,里面是密闭的气腔,工作时在加热体的作用下,气体在内部形成一个热气团,热气团的比重和周围的冷气是有差异的,通过惯性热气团的移动形成的热场变化让感应器感应到加速度值。由于压电式MEMS加速度计内部有刚体支撑的存在,通常情况下,压电式MEMS加速度计只能感应到“动态”加速度,而不能感应到“静态”加速度,也就是我们所说的重力加速度。而容感式和热感式既能感应“动态”加速度,又能感应“静态”加速度。

从上面的分析中,我们可以看到利用容感式和热感式加速度计进行定向时,加速度计测得的加速度里面包括重力加速度在各个轴上的重力分量和动态运动引起的加速度分量。因而,我觉得我们在利用这一类加速度计进行定向时,必须将动态加速度去掉(较为困难);在进行检测芯片的运动时,必须将重力加速度的去掉。
MEMS陀螺仪
MEMS陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力。假设旋转物体有径向速度Vr,那么将会产生切向科里奥利加速度。
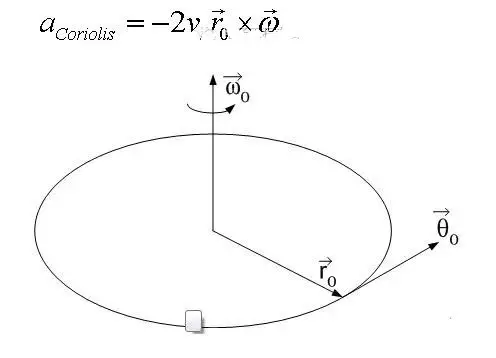
从上面的公式中,我们可以看到科里奥利加速度的大小是正比于物体旋转的角速度。如果我们在切向安装一个加速度计测出科里奥利加速度,那么我们就可以间接得到物体旋转的角速度。
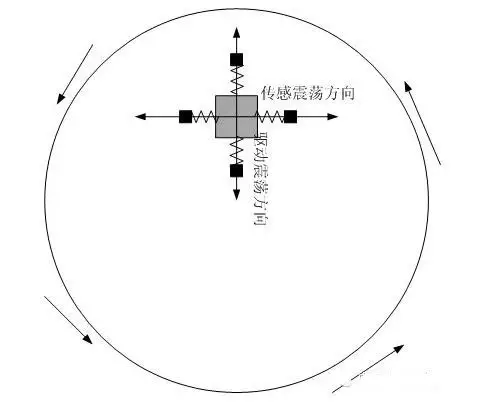
实际的MEMS陀螺仪的设计如下图。如果物体在圆盘上没有径向运动,科里奥利力就不会产生。因此,在MEMS陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90度。MEMS陀螺仪通常有两个方向的可移动电容板。径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式),横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度)。因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度。
文章来源:新电子